









好货推荐






获取最低报价
商家收到后会立即联系您
请阅读并同意隐私政策
产品分类
相关产品推荐
-
 ¥178000.00
升降电梯电动升降货梯物流输送电梯 实现工厂大件货物上下楼层自动垂
¥178000.00
升降电梯电动升降货梯物流输送电梯 实现工厂大件货物上下楼层自动垂
-
¥19000.00
新款松下交直流氩弧焊机YC-350WX5 铝焊和不锈钢焊接升级
-
¥39000.00
松下YC-500WX5全数字交直流氩弧焊机 铝焊用TIG焊机
-
¥26000.00
火焰切割机器人 自动打坡口
-
¥27000.00
激光焊接机器人 取料机器人自动上下料机器人
进入手机版

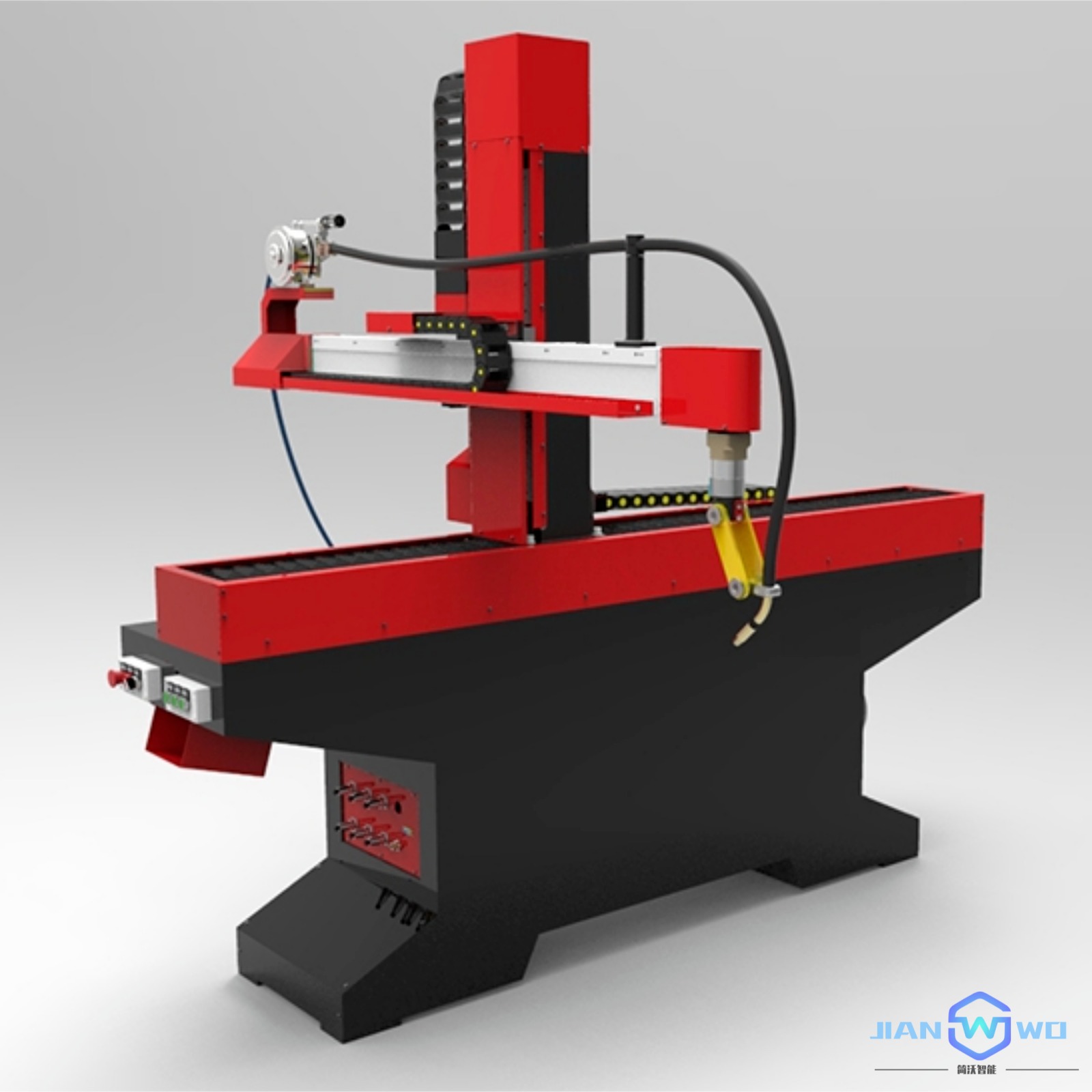
工作范围 : |
±360° |
品牌 : |
简沃 |
型号 : |
JW-2000 |
关节数量 : |
6 |
手腕负载 : |
6 kg |
工作半径 : |
4500mm |
本体重量 : |
250 kg |
功率 : |
2.2KW |
关节速度 : |
322-516°/s |
防护等级 : |
IP43 |
重复定位精度 : |
±0.03mm |
工作温度 : |
0-45℃ |
产品详情
Product details
坐标焊接机器人能够模仿人手部的动作,代替人工按指定的焊接轨迹要求进行气保焊,氩弧焊和超声波焊接,并能够在高温高压、粉尘噪音及带有放射性和污染的危险作业环境下实现大批量,重复性强的焊接工作,与传统关节机器日相比,具有定位精度高,焊缝性强,焊接速度快,工作量可控,运行平稳可靠,维修简单方便等特点,并且成本却只相当于关节机器人的百分之二三十,性价比极高。
基本情况说明:
坐标的基本概念:对机器人进行轴操作时,可以使用以下几种坐标系:
1.关节坐标系
机器人各轴进行单独动作,称关节坐标系。
2.直角坐标系
不管机器人处于什么位置,均可沿设定的X 轴、Y 轴、Z 轴平行移动。
3.工具坐标系
工具坐标系把机器人腕部法兰盘所持工具的有效方向作为Z 轴,并把坐标定义在工具的 点。
4.用户坐标系
机器人沿所指定的用户坐标系各轴平行移动。
在关节坐标系以外的其他坐标系中,均可只改变工具姿态而不改变工具 点(控制点)位置,这叫做控制点不变动作。










搜好货供应商上海简沃机械有限公司供应坐标焊接机器人 用于专机气保焊氩弧焊和超声波焊接,为您提供详细的产品报价、参数、图片等商品信息,如需进一步了解坐标焊接机器人 用于专机气保焊氩弧焊和超声波焊接,请与厂家直接联系,请在联系时说明是在搜好货网看到这条商机的。
联系方式
Contact information
真诚期待您的来电
- 上海简沃机械有限公司
- 代文龙 销售部
- 18201707759
- 上海市市辖区宣秋路567号
为您精选
-
等离子切割机器人 高精度切割和打坡口
¥28000 -
凯尔达LGK-40N单相220V小型等离子切
¥1380 -
瑞凌空气等离子切割机LGK-63G 轻工业级
¥3600 -
瑞凌空气等离子切割机CUT-80100GT
¥3950 -
瑞凌空气等离子切割机CUT-40CT60CT
¥1400
-
瑞凌等离子切割机 内置空压机CUT-100N
¥5100 -
瑞凌LGK-160I台式直流工业级IGBT模
¥11000 -
内置气泵空气等离子切割机LGK-638010
¥6800 -
松下铝焊机YD-500GP5 可焊铝、铜、镁
¥14800 -
低飞溅松下焊机YD-500GS5 焊接飞溅低
¥15000
关节型机器人相关商机
- FANUC M-410iB 码垛机器人 发那科机器人包装生产线物料码垛拆垛四轴搬运机器人
- FANUC R-1000iA 100F 搬运机器人 130F发那科点焊机器人 80F打磨机器人
- 复合材料切割机器人本溪现代机器人三维激光切割设备维修
- 库卡切割机器人天津kuka机器人岩板切割机器人价格
- 机器人离线切割广西川崎机器人等离子自动切割生产线维修
- 库卡打磨机器人锦州欧地希机器人激光切割技术代理
- 青岛赛邦智能供应焊接稳定的SAIBON-A180四轴焊接机器人
- 碳纤维切割机器人抚顺川崎机器人钢板切割机器人厂家
- 安川切割机器人宁夏ABB机器人钢管切割机器人价格
- 安川EPH130RLD压铸造机下探取件机器人
- ABB机器人石油钻具激光熔覆 激光熔化沉积 激光增材制造
- ABB IRB1200 柔性生产线搬运装配机器人 演示培训教学演示机器人的理想选择
猜你在找
推荐厂家
查看更多
此坐标焊接机器人 用于专机气保焊氩弧焊和超声波焊接产品由上海简沃机械有限公司在2021-04-27T15:12:02更新,主要更新内容为:产品图片,产品详情,产品促销语,产品起订价,产品起订量信息。







